Research
Research Mission
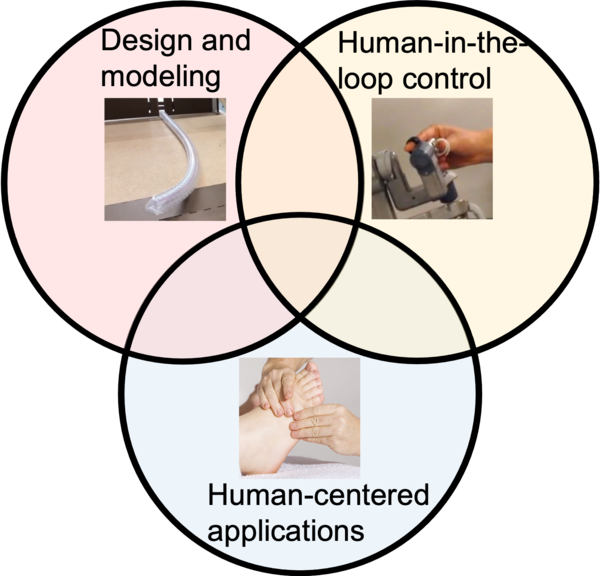
The IRIS Lab's research mission is to create innovative robot designs, understand the mathematical principles behind their movement and force application, study their interaction with humans, and apply them to improve human life.
We explore novel robot designs, often inspired by nature and using non-traditional materials, and we develop mathematical models to understand how they operate. We also study human-robot physical interaction and control methods to allow humans to safely and intuitively interact with robots. Our research aims to make robots more useful in applications that improve human health, safety, and productivity, such as robotic exploration of environments where humans cannot enter, human-safe robotic manipulation, robot-assisted human training and rehabilitation, and remote telepresence.
Check out this video tour of the IRIS lab (recorded in October 2023) to see our lab space and some of the projects we are working on!
Current Research Areas
Soft and Bioinspired Robot Locomotion and Manipulation
Soft robots, i.e., robots made of soft materials, can undergo large changes in shape and adapt mechanically to their environments. Bioinspired robots take inspiration from the capabilities of animals and plants in nature, which often far surpass current robots. We are currently researching design, modeling, and control of soft and bioinspired robots, inspired by the growth of vines, the locomotion of amoebas, and the motion of animals with prehensile tails.
Current researchers: Ciera McFarland, Allison Fick, Eddie Pohl, Jack Rowe, and William Shepherd
Shape and Force Sensing for Soft Robots

Soft robots can be considered to have infinite degrees of freedom in their shape and contact conditions with their environment. This makes it challenging to sense their state, as existing sensors are often not designed to bend, stretch, or cover large areas. We are currently researching fiber optic and air pressure sensing to allow for large area coverage and full-state sensing of soft robots, which can be used to improve robot control and enable new behaviors.
Current researchers: Michael Mitchell and Kabir Madan
Soft Wearable Assistive Robots

Robotic devices with the capability to replace lost limbs or to move and apply forces to the human body can assist the physically impaired with activities of daily living and/or rehabilitation. Soft robotics can allow us to innovate in the design of wearable assistive robots, making them capable of new tasks, with inherent physical safety, and at low cost. We are currently researching soft and bioinspired designs, models, and control methods for exosuits, prosthetic limbs, and remote physical therapy robots.
Current researchers: Katalin Schäffer and Bona Park